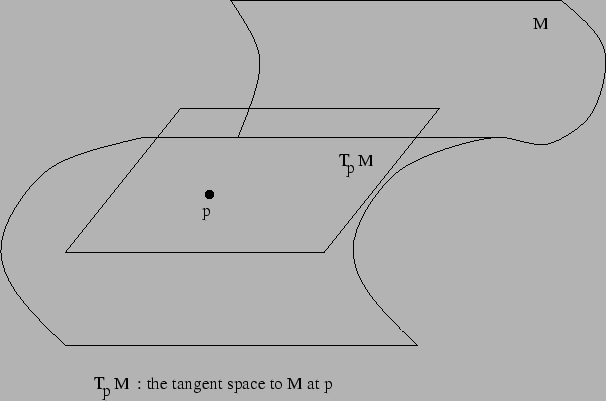
Let us now consider a small region M of space on which it is possible to put coordinates, say (x1, x2, x3). Moreover, any other choice of coordinates, say (y1, y2, y3) is differentiable (to any order) with respect to the given choice, that is to say the yi are differentiable functions of the xi, and vice versa. Then we have the non-singularity of the Jacobian matrix
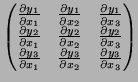 .
.
With respect to the given choice of coordinates
(x1, x2, x3) a vector
![]() can be represented by a column vector
a = (a1, a2, a3)t. A basis for the tangent vector space at all
points is given by the standard basis
{e1, e2, e3} of
can be represented by a column vector
a = (a1, a2, a3)t. A basis for the tangent vector space at all
points is given by the standard basis
{e1, e2, e3} of ![]() .
We are also interested in tensor fields, which are sums of terms of the
form
fi1, i2,..., irei1
.
We are also interested in tensor fields, which are sums of terms of the
form
fi1, i2,..., irei1 ![]() ei2
ei2 ![]() ...
... ![]() eir where
fi1, i2,..., ir is a differentiable function.
The number r is called the order of the corresponding tensor. A tensor
of order 0 is thus just a differentiable function and one of order 1 is
a (tangent) vector field.
eir where
fi1, i2,..., ir is a differentiable function.
The number r is called the order of the corresponding tensor. A tensor
of order 0 is thus just a differentiable function and one of order 1 is
a (tangent) vector field.
In another system of coordinates
(y1, y2, y3) the vector ![]() is given by the column vector
J(x, y) . a. This can be
extended to tensors in an obvious way. With this understanding we now
fix a choice of coordinates and a corresponding representation of
tangent vectors as column vectors.
is given by the column vector
J(x, y) . a. This can be
extended to tensors in an obvious way. With this understanding we now
fix a choice of coordinates and a corresponding representation of
tangent vectors as column vectors.
In order to measure the magnitude and angle of velocities we are given a symmetric positive definite bilinear pairing < , > on the tangent space at each point. With respect to a given representation of tangent vectors as column vectors, this is given by a positive definite symmetric matrix (gij)i, j = 1i, j = 3 of functions on the space. Moreover, we further assume that the matrix entries gij are differentiable (to any order) functions of the coordinates. Such a pairing is called a Riemannian metric. Having prescribed this we have a (local) Riemannian manifold.
The pairing < , > also extends to pairing on the various types of tensors by induction on the order. In fact we can pair a tensor of order r with a tensor of order s to obtain a tensor of order | r - s|.
For any vector field V we have learned in vector calculus to
compute the gradient
![]() (V) with respect to a vector
(V) with respect to a vector
![]() at a point p. We have also learned about the gradient of a
function f. These give an example of a derivation; in other words we
have the Liebnitz rule
at a point p. We have also learned about the gradient of a
function f. These give an example of a derivation; in other words we
have the Liebnitz rule
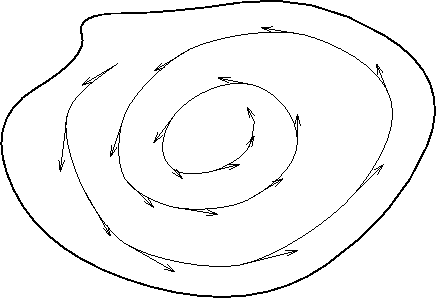
Given a vector field V we can apply the existence theorem for ordinary
differential equations to construct a 1-parameter flow ![]() on our
space M. This satisfies
on our
space M. This satisfies
![]() =
= ![]() o
o![]() and
and ![]() fixes all points. Finally, we have
d
fixes all points. Finally, we have
d![]() (p)/dt = V(
(p)/dt = V(![]() (p)); which
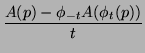
is the ordinary differential equation we have solved. For any tensor
field A, the following limit exists by differentiability of the
quantities involved
(p)); which
is the ordinary differential equation we have solved. For any tensor
field A, the following limit exists by differentiability of the
quantities involved
While the gradient of a function is independent of a choice of coordinates because of the interpretation as Lie derivative, the gradient of a tensor of order at least 1 is clearly dependent upon the choice of coordinates, thus it is natural to ask for a derivation D that is in some sense ``canonical''. This is provided by the condition that the inner product form < , > has no derivative,
In geometric terms, the usual gradient
![]() (A) measures
the deviation of
A(p + t
(A) measures
the deviation of
A(p + t![]() ) from a copy of A(p) moved to the
point
p + t
) from a copy of A(p) moved to the
point
p + t![]() . However, this motion requires a notion of parallel
transport or rigid motion--which may be different for our geometry from
the Euclidean one provided by the coordinates; the Riemannian metric
provides the correct notion of angles and distances and hence of rigid
motion. Thus D provides the ``corrected'' gradient.
. However, this motion requires a notion of parallel
transport or rigid motion--which may be different for our geometry from
the Euclidean one provided by the coordinates; the Riemannian metric
provides the correct notion of angles and distances and hence of rigid
motion. Thus D provides the ``corrected'' gradient.
Now it is conceivable that there is a choice of coordinates in which the
![]() (
(![]() )'s vanish or simplify. Thus we need to find some way of
checking this possibility. Riemann introduced the Riemannian curvature
as a measure of this. This was modified by Christoffel who defined the
curvature operator as follows. First of all for a vector field V and a
tensor field A let us define
DV(A)(p) = DV(p)(A). We then define
the operator R by
)'s vanish or simplify. Thus we need to find some way of
checking this possibility. Riemann introduced the Riemannian curvature
as a measure of this. This was modified by Christoffel who defined the
curvature operator as follows. First of all for a vector field V and a
tensor field A let us define
DV(A)(p) = DV(p)(A). We then define
the operator R by
An important result of Cartan and Hadamard (see [3]) states that any Riemannian space M as above with the property that its sectional curvature is constant can be identified with an open subset of either the Euclidean space or Hyperbolic (Bolyai-Lobachevsky) space or Projective space in an isometric way.
We will see in the next section how to apply this to the study of axiomatic geometries.