Next: Surfaces
Up: Coordinate Geometry
Previous: Conics
To emphasise the obvious, the fundamental difference between lines and
curves is that the latter are ``curved''. How do we quantify this
``curvy-curvy''-ness or curvature? We shall give a definition and
examine some properties.
Let C denote the curve given as the locus of points (x, y) in the
coordinate plane which satisfy the equation f (x, y) = 0. (Here and
elsewhere we will restrict ourselves to polynomial functions since
these are the natural outcome of the operations so far defined
geometrically). Let
p = (x0, y0) be a point on the curve. For any
line l (for example given by the equation
a(x - x0) = b(y - y0)) that
contains this point we can define the order of contact between
l and C at p as follows. We substitute the parametric solution
(x, y) = (bt + x0, at + y0) of the line in the equation of C to obtain
F(t) = f (bt + x0, at + y0). The order of contact r(l, C, p) is then the
``largest'' power of t that divides F(t). If F(t) = 0 then the
curve contains the line l and we define
r(l, C, p) =  otherwise
this order is bounded above by the degree of F which is a polynomial
in t. Since t = 0 corresponds to the point p we always have
r(l, C, p)
otherwise
this order is bounded above by the degree of F which is a polynomial
in t. Since t = 0 corresponds to the point p we always have
r(l, C, p)  1.
1.
Definition 1
A line l with a higher order of contact with C at p
than any other line is called an osculating line or tangent to
C at p.
Exercise 2
Either
r(
l,
C,
p)
2 for all
l through
p or there
is a unique line
l through
p for which
r(
l,
C,
p)
2. In the
former case we say
C is
singular at
p and in the latter case
we say that
C is
non-singular or
smooth at
p.
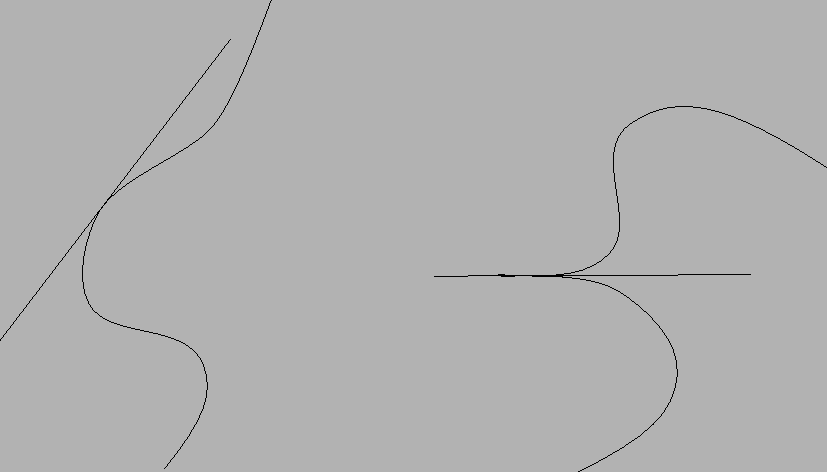
picture(8273,5477)(886,-5425)
(886,-5371)(0,0)[lb]Smooth curve and its tangent line
(5281,-5341)(0,0)[lb]Singular curve and its tangent
Smooth and Singular Curves
In what follows we will concentrate our attention on non-singular
curves. The singular case is very interesting but beyond the scope of
our current discussion.
In order to motivate one definition of curvature, we first note that a
circle is clearly curved. The curvature of a circle should be
inversely proportional to the radius since the family of circles
touching a line at a given point approach the line as the radius
increases. Thus we could define
Definition 2
Given a point on a curve the osculating circle is
the circle that has the highest order of contact with the curve at the
given point. The curvature of the curve at the given point is
the inverse of the radius of this circle.
picture(5353,5687)(2326,-5815)
Of course, we must first define the order of contact of a circle and a
curve or more generally of two curves, then we must show that a unique
circle as defined exists. Note also that once we use circles in a
definition we can only make changes of coordinates with preserve
circles and their radii; that is, rotations, reflections and
translations. In other words, we must fix a notion of distance for
curvature to make sense.
Exercise 3
Show that
(
u,
v)

(
x +
y3,
y) is a one-to-one and onto
correspondence between the (
u,
v)-plane and the (
x,
y)-plane. What
curves in the (
u,
v)-plane correspond to lines in the (
x,
y)-plane?
Are these curved? Can we take these to be lines in a geometry?
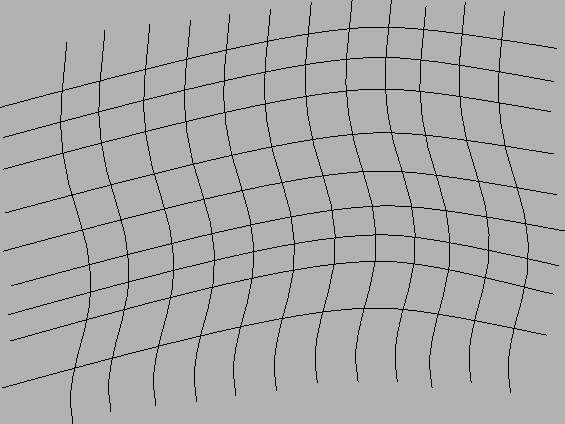
picture(5626,4613)(548,-4846)
(2431,-4846)(0,0)[lb]Curvilinear coordinates
To mimic the definition of the order r(l, C, p) of contact of a line
and a curve in order to define r(C, D, p) we need to find a
parametric solution of at least one of the curves. Such
parametrisations are impossible in general. Instead, we have
Definition 3
We say that
(x(t), y(t)) is a parametric solution of f (x, y) of order r if tr divides
f (x(t), x(t)).
If C and D are curves defined by f (x, y) = 0 and g(x, y) = 0 and
p = (x0, y0) is a point on both the curves then we say that C and
D have order of contact (at least) r is there is a common
parametric solution
(x(t), y(t)) or order r for both curves so that
(x(0), y(0)) = (x0, y0). We can define r(C, D, p) as the supremum of
such r.
Exercise 4
Show that
r(
C,
D,
p)
2 for smooth curves
C and
D
if and only if the tangent lines at
p to
C and
D respectively
coincide.
In particular, it is always possible to find a circle D which has
order of contact 2 at a given point
p = (x0, y0) on C. In order
to find a circle with order of contact 3 or more we need to find
conditions so that the following equations have a common solution
| t3 |
| |
(x0 + x1t + x2t2 - a)2 + (y0 + y1t + y2t2 - b)2 - r2 |
|
| t3 |
| |
f (x0 + x1t + x2t2, y0 + y1t + y2t2) |
|
We collect coefficients of 1, t and t2 to obtain the following
system of equations
| (x0 - a)2 + (y0 - b)2 - r2 |
= |
0 |
|
| f (x0, y0) |
= |
0 |
|
| (x0 - a)x1 + (y0 - a)y1 |
= |
0 |
|
| fx(x0, y0)x1 + fy(x0, y0)y1 |
= |
0 |
|
| (x0 - a)x2 + (y0 - a)y2 + x12 + y12 |
= |
0 |
|
| fxx(x0, y0)x12 + 2fxy(x0, y0)x1y1 + fyy(x0, y0)y12 + |
|
|
|
| fx(x0, y0)x2 + fy(x0, y0)y2 |
= |
0 |
|
Here we adopt the subscript notation gu to denote the (partial)
derivative of a polynomial g in the variable u; we note that
this derivative is defined formally (without the use of limits) and
arises in the above equations due to the binomial expansion which is
the Taylor expansion for polynomials.
Exercise 5
A solution for the above equations exists only if
r2 =

Moreover, if we can form square roots then a solution does exist in
this case.
Thus we obtain the following formula for the curvature  of a
curve
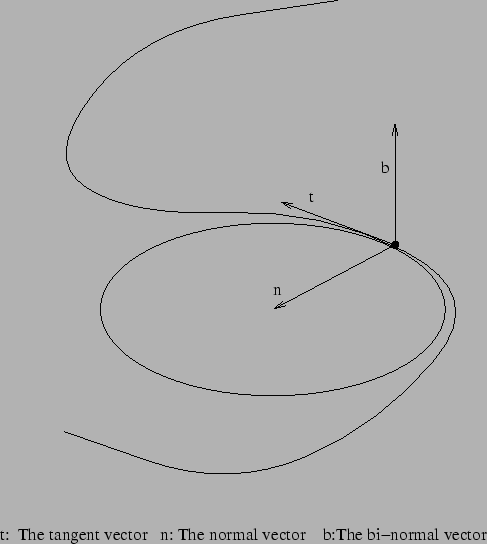
Another way to approach curvature is by reversing Newton's law of
motion. If a body experiences no acceleration then it must travel
along a straight line at constant speed. Thus, we can define the
curvature of a curve as (the magnitude of) the acceleration
experienced by a body travelling along the curve at constant
speed. This definition has the advantage of being applicable to space
curves
(x(t), y(t), z(t)) as well. We again have to surmount a
difficulty that it may not be easy to find
(x(t), y(t), z(t)) so that
(xt(t), yt(t), zt(t)) is of length 1; certainly there will in
general be no polynomial functions that will do the trick. However, we
note that acceleration is just
(xtt(0), ytt(0), ztt(0)) for
such a curve so that it will be enough to find a parametric solution
of order 3 which has constant speed.
of a
curve
Another way to approach curvature is by reversing Newton's law of
motion. If a body experiences no acceleration then it must travel
along a straight line at constant speed. Thus, we can define the
curvature of a curve as (the magnitude of) the acceleration
experienced by a body travelling along the curve at constant
speed. This definition has the advantage of being applicable to space
curves
(x(t), y(t), z(t)) as well. We again have to surmount a
difficulty that it may not be easy to find
(x(t), y(t), z(t)) so that
(xt(t), yt(t), zt(t)) is of length 1; certainly there will in
general be no polynomial functions that will do the trick. However, we
note that acceleration is just
(xtt(0), ytt(0), ztt(0)) for
such a curve so that it will be enough to find a parametric solution
of order 3 which has constant speed.
We now apply this method to the curve defined by f (x, y) as
above. The above considerations lead to the following pair of
conditions
| t3 |
| |
f (x0 + x1t + x2t2, y0 + y1t + y2t2) |
|
| t2 |
| |
(x1 + 2x2t)2 + (y1 + 2y2t)2 - 1 |
|
We then have to compute (x2, y2) or rather its magnitude. Now we
collect coefficients of powers of t as before to obtain the
following system of equations
| f (x0, y0) |
= |
0 |
|
| fx(x0, y0)x1 + fx(x0, y0)y1 |
= |
0 |
|
| fxx(x0, y0)x12 + 2fxy(x0, y0)x1y1 + fyy(x0, y0)y12 + |
|
|
|
| fx(x0, y0)x2 + fy(x0, y0)y2 |
= |
0 |
|
| x12 + y12 |
= |
1 |
|
| x1x2 + y1y2 |
= |
0 |
|
Exercise 6
Solve the above equations to
obtain the magnitude

=

of the acceleration as
Thus we see that the notion of curvature can indeed be recovered from
Newton's law as the acceleration of a particle moving along the curve
at constant speed.
We now compute the curvature for any parametric curve
(x(t), y(t), z(t) at the point p corresponding to t = t0. To
compute curvature following the above definitions we need to
re-parametrise the above curve by
t = t0 + g(s) so that the parametric
curve
(x'(s), y'(s), z'(s)) = (x(t0 + g(s)), y(t0 + g(s)), z(t0 + g(s))) is
traversed at constant speed (with respect to the parameter s). The
acceleration
(x'ss(0), y'ss(0), z'ss(0)) gives the curvature
of the curve as its magnitude.
Exercise 7
Work with a solution
g(s) = g1s + g2s2 of order 3
to obtain an expression for the curvature of this curve.
A useful notion is that of the directional derivative
Dv(g)(p) of a function g at a point
p = (x0, y0) along a
direction
v = (x1, y1). This is the derivative at t = 0 of the
function
G(t) = g(x0 + tx1, y0 + ty1); in other words
Dv(g)(p) = x1gx(x0, y0) + y1g(x0, y0) + z1g(x0, y0)
We consider the function which assigns to each point of a plane curve
C its unit normal, that is
(
x,
y)
 n
n(
x,
y) =
Exercise 8
Show that the directional derivative
Dv(n)(x, y) of
n(x, y) is a vector which is orthogonal to n(x, y).
In particular, we note that if v is a non-zero tangent vector to C
at a point (x0, y0) on C then
Dv(n)(x0, y0) =  . v for
some .
. v for
some .
Exercise 9
Show that
is the same as the curvature of
C
upto sign.
An important aspect of the above calculations is that there is no
``intrinsic'' curvature to a curve--at least not in a local picture.
Any curve can be parametrised in such a way that distance along the
curve depends linearly on the parameter; exactly as for a line. The
curvature occurs only in the manner in which the curve is embedded in
the surrounding plane (or space). We shall see that the behaviour for
surfaces is very different.
Next: Surfaces
Up: Coordinate Geometry
Previous: Conics
Kapil H. Paranjape
2001-01-20